AUTOEV@L, el futuro de la movilidad
El proyecto es una apuesta estratégica de los centros y entidades de I+D de la CAPV, universidades y agentes tecnológicos intermedios para estrechar colaboraciones y generar sinergias
AUTOEV@L es un Proyecto de Investigación Fundamental Colaborativa, dentro de la convocatoria ELKARTEK 2021, para la evolución tecnológica hacia la automatización multivehicular y evaluación de funciones de conducción altamente automatizadas. El proyecto se engloba en la estrategia ya presentada en el proyecto AUTOLIB de la convocatoria ELKAERTEK 2019. Se desarrolla por un consorcio interdisciplinar de ocho entidades entre las que se encuentran; CEIT, Ikerlan, Tecnalia, Vicomtech, AIC – Automotive Intelligence Center, Mondragon Unibertsitatea, Universidad del País Vasco – UPV/HU y Basque Center for Applied Mathematics – BCAM.
El grupo de Machine Learning de BCAM, investiga el desarrollo de algoritmo de aprendizaje máquina para la localización precisa de vehículos autónomos que utilicen información colaborativa de forma eficiente y que obtengan altas precisiones en entornos complejos con obstáculos.
La conducción autónoma requiere de técnicas para la localización precisa de vehículos. Los sistemas globales de navegación por satélite (GNSS, por sus siglas en inglés) pueden satisfacer la demanda de navegación en exteriores, pero no son fiables en interiores y en entornos urbanos debido a la fuerte atenuación de las señales de los satélites. Por ello, en los últimos años se han desarrollado numerosas soluciones de localización basadas en otras tecnologías, como la radiofrecuencia.
Sin embargo, en la práctica, el alcance de las técnicas de radiofrecuencia se ve afectado por la propagación sin línea de visión (NLOS). La condición NLOS es muy común en la conducción autónoma, ya que a menudo los entornos urbanos constan de numerosos elementos que hacen del escenario de conducción un problema de aprendizaje complejo. En particular, las condiciones NLOS pueden dar lugar a grandes errores de alcance que degradan significativamente el rendimiento de la localización.
En concreto, cada vehículo obtiene estimaciones de su posición utilizando mediciones con respecto a satélites GNSS y a otros vehículos, identificando los casos en los que se produce una transmisión de la señal NLOS y mitigando los posibles errores que dicho dato genere.
El método de mitigación de NLOS propuesto estará basado en el auto-entrenamiento o supervisión débil, eliminando así la necesidad de datos etiquetados y el coste asociado a su obtención. Además, el procedimiento de auto-entrenamiento no necesita entrenar aprendices adicionales. Dicho método se integra en un sistema de localización de fusión de información multisensorial, como ilustra la Figura 1. La figura de la derecha muestra la ventaja obtenida al integrar información relativa a medidas de distancia (representadas por arcos circulares en azul) con información angular (representada por rectas verdes). En la figura izquierda se muestra cómo esta aproximación de la posición puede mejorarse aún más al incorporar información contextual como, por ejemplo, saber que nos encontramos en un parking determinado.
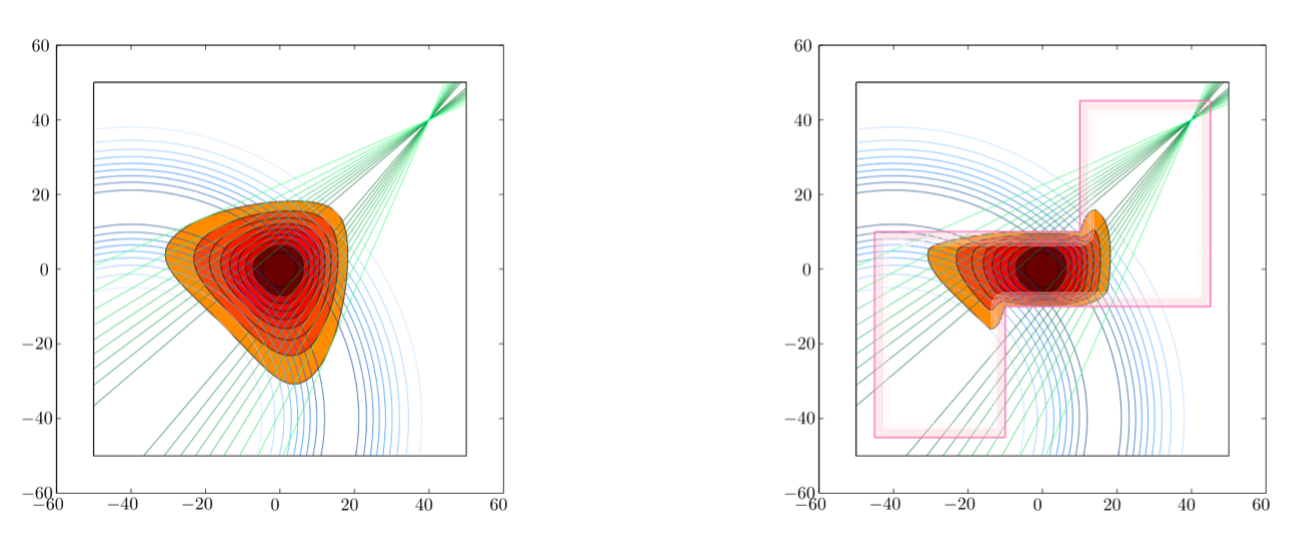
Figura 1. Fusión de la información. En la figura izquierda se muestra la fusión de la información de localización débil e información angular débil. En la figura derecha se muestra la fusión de la información de localización débil, información angular débil e información contextual débil.
Los resultados esperados
Los métodos que se encuentran en desarrollo incluyen fusión de la información multisensorial y mitigación del NLOS para mejorar la precisión. Además, no requieren de datos etiquetados ni se basan en huellas digitales, evitando la necesidad de construir costosas bases de datos. De esta forma, dichos métodos en desarrollo permitirán mejorar el proceso de localización de vehículos, con un especial énfasis en la mejora en la localización, navegación en entornos complejos con obstáculos y dar un paso más en la mejora de la conducción autónoma.